
2-Finger Gripper with Interchangeable Fingers (4 kg payload)<em>.</em>
2-Finger Gripper with Interchangeable Fingers (4 kg payload)
2FIF-M/I-04-100 (2-Finger Gripper with Interchangeable Fingers with 4 kg Payload & 100 mm Stroke)

Product overview
- Fingers suitable for the target object can be automatically changed during operation.
- The finger changing mechanism uses magnets, allowing for a compact overall design.
- Users can either manufacture their own fingers or purchase standard fingers. When manufacturing their own, users must purchase a finger-side unit for the Automatic Finger Changer (AFC).
Product specifications
| Model | 2FIF-M-04-100 | 2FIF-I-04-100 | ||||
|---|---|---|---|---|---|---|
| No. of fingers | 2 (1 DOF) | |||||
| Force-fit payload | 4 kg (max) | |||||
| Stroke | 100 mm 1) | |||||
| Grip force | 70 N (max) | |||||
| Closing time | 2.9 s (default) / 2.4 s (min) | |||||
| Repeatability | 0.2 mm | |||||
| Weight | 0.72 kg 2) | 0.95 kg 3) | ||||
| Dimensions (Gripper) | 162(W)×70(D)×178(H) mm 2) | 162(W)×70(D)×203(H) mm 3) | ||||
| Dimensions (Interchangeable finger) | 16(W)×48(H)×16.5(D) mm | |||||
| Supply voltage | 24 VDC | |||||
1) A 2FIF-M/I-04-150 model is available for a finger stroke of 150 mm.
2) Including the MATC tool-side unit (MATC-10-T)
3) Including the drive unit and excluding the ATC tool-side unit & robot bracket
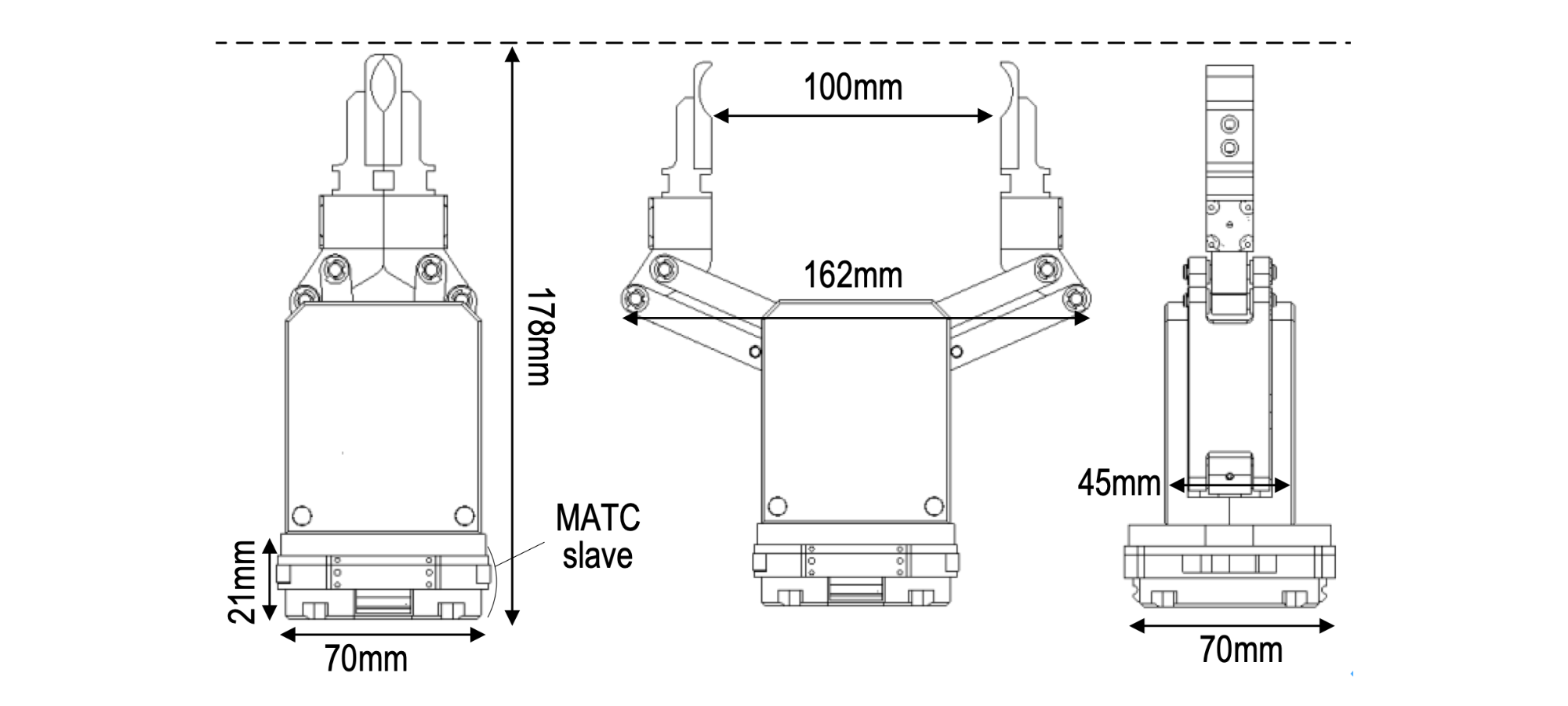
Dimensions of 2FIF-M-04-100
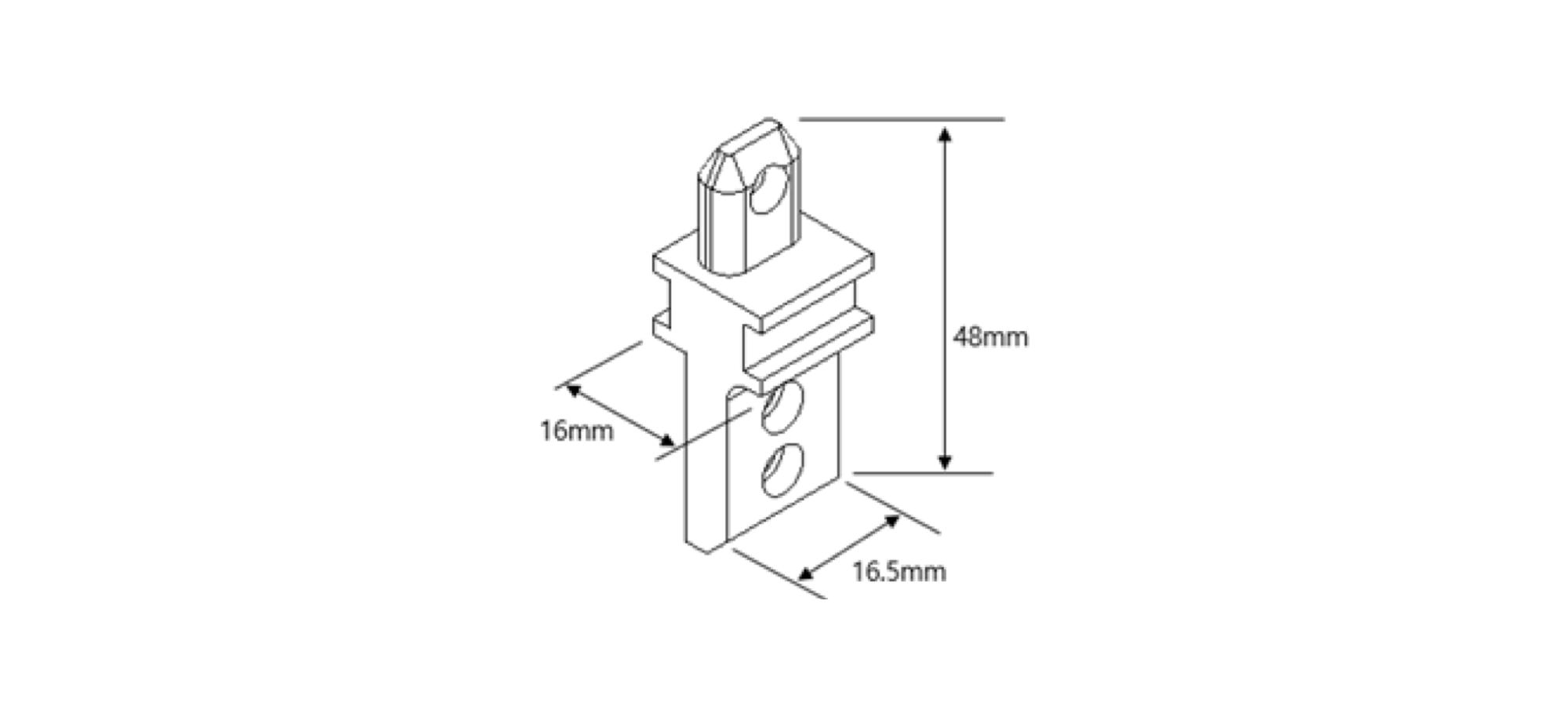
Dimensions of slave of interchangeable finger