
중력보상 장치.
Counterbalance Mechanism
KR-CBM (CounterBalance Mechanism)
제품 개요
- 중력보상 장치(CounterBalance Mechanism, CBM)는 로봇의 자중과 가반하중으로 인하여 발생하는 중력토크를 기계적으로 적절히 보상함으로써, 로봇의 자세 유지에 필요한 토크를 최소화하는 장치임.
- 협동로봇에 탑재하여 기존의 모터를 그대로 사용하면서도 가반하중을 1.5 – 2배 증가시킬 수 있음.
- 주로 가장 큰 중력토크가 발생되는 관절 2에만 설치하여 1자유도 중력보상을 수행하지만, 관절 2와 3에 모두 장착하는 2자유도 중력보상으로 최대의 중력보상 효과를 얻을 수도 있음.
CBM 사용 시의 장점
- 15kg (20kg)급의 협동로봇에 사용되는 중형 모터로 25kg (30kg)급 협동로봇 구현 가능.
- 동일한 가반하중을 위해서 저용량 모터의 사용이 가능하므로 에너지 절감 (30 ~ 35%) 효과와 오동작 시에 상대적으로 안전함. 모바일 로보암에 적합.
- 기존 협동로봇의 제어기를 그대로 사용 가능. (기구부는 약간 개조 필요)
협동로봇에 중력보상 장치를 사용하여야 하는 이유
- 고 가반하중을 위해서 단순히 모터 용량을 증가시키면 되는 산업용 로봇과는 달리, 사람과 동일한 공간에서 동작하는 협동로봇의 경우에는 안전상의 이유로 고전압(96V 또는 200V)이 필요한 고용량 모터를 사용할 수 없으므로(IEC62386에 의하면 사람과 같이 작업하는 기계의 경우 안전상 DC 60V 이하로 제한), 중력보상 장치를 통해서 가반하중이나 작업반경을 증가시키는 것이 필요함.
종류
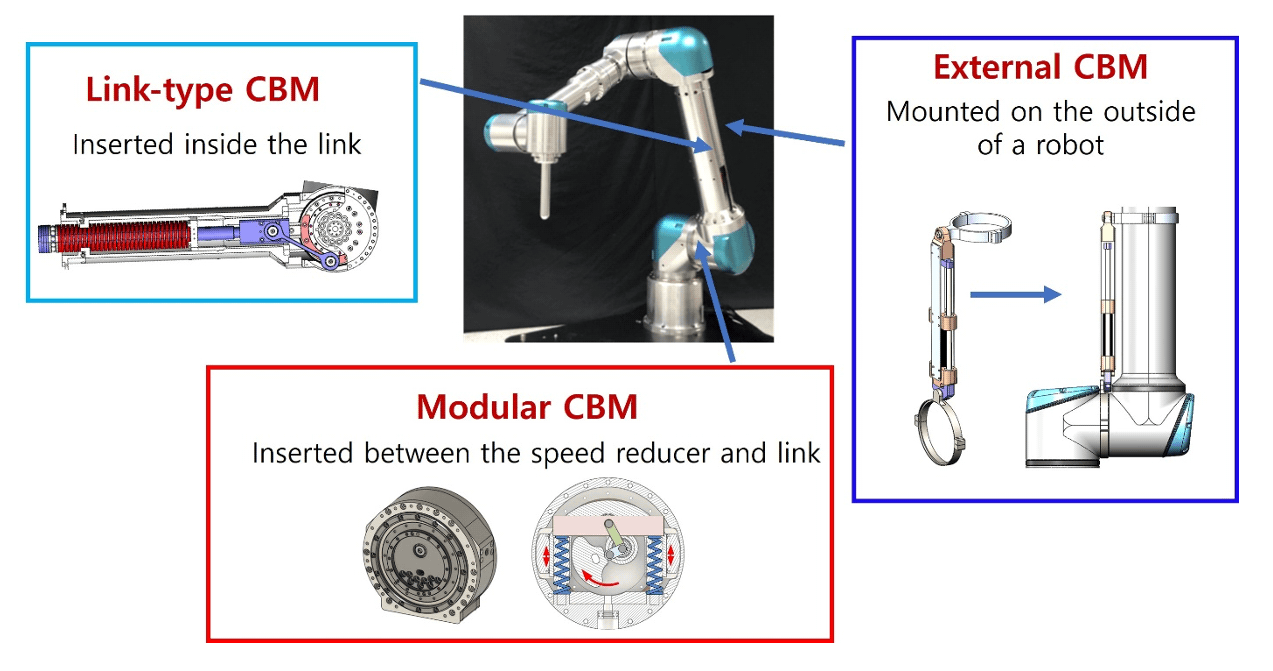
- 링크형 CBM: 긴 막대 형태로 공급되며, 코일 스프링을 사용함. 링크 2의 빈 공간에 설치되므로 설치될 로봇의 형상에 맞추어 치수 및 취부가 결정되어야 함. 로봇과 병렬 연결이므로 로봇의 강성에 영향을 주지 않음.
- 모듈형 CBM: 하모닉 드라이브 형태의 모듈로 공급됨. 링크 2와 관절 2의 모듈 사이에 삽입되어 로봇 기구부를 거의 개조하지 않고 장착 가능함. 로봇과 직렬 연결이므로 로봇의 강성에 영향을 줄 수 있음.
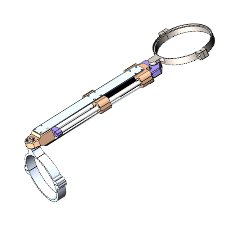
- 외장형 CBM: 기존 로봇의 외부에 클램핑을 통하여 장착되므로 로봇 기구부의 개조가 전혀 필요 없음. 로봇과 병렬 연결이므로 로봇의 강성에 영향을 주지 않음.
제품 사양
| Model | LCBM | MCBM | ECBM | |||
|---|---|---|---|---|---|---|
| Shape | 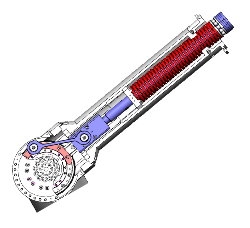 |
 |
 |
|||
| Spring type | Coil spring | Gas spring | Gas spring | |||
| Mounting location | Inside link 2 | Between joint 2 and link 2 | Outside link2 | |||
| Mounting feature | Link 2 needs to be slightly redesigned. | The mounting interface at joint 2 needs to be modified. | Mounted directly onto the existing robot | |||
| Connection | Parallel connection | Series connection | Series connection | |||
| Robot stiffness | No change | 10% decrease at joint 2 | No change | |||
| Compensation torque | 100 – 650 Nm (1 spring), 1300 Nm (2 springs) |
100-300 Nm | 100-300 Nm | |||
| CBM hysteresis | Almost none | Relatively large hysteresis | Relatively large hysteresis | |||
| Control performance | Applying CBMs has no impact on the control performance | |||||