
Tooling.
모터 내장형 자동 툴체인저와 다양한 툴로 구성된 신개념 툴링 시스템
배경
- 로봇 손: 다양한 작업이 가능하지만, 고비용/저내구성으로 실제 사용은 제한적임.
- 툴(그리퍼 포함): 저비용/고내구성을 갖지만, 단순한 작업에만 적용 가능함.
- 해결책: 작업에 맞게 다양한 툴을 자동으로 교체하여 사용할 수 있다면, 작업성/내구성/저비용을 동시에 구현하는 것이 가능함.
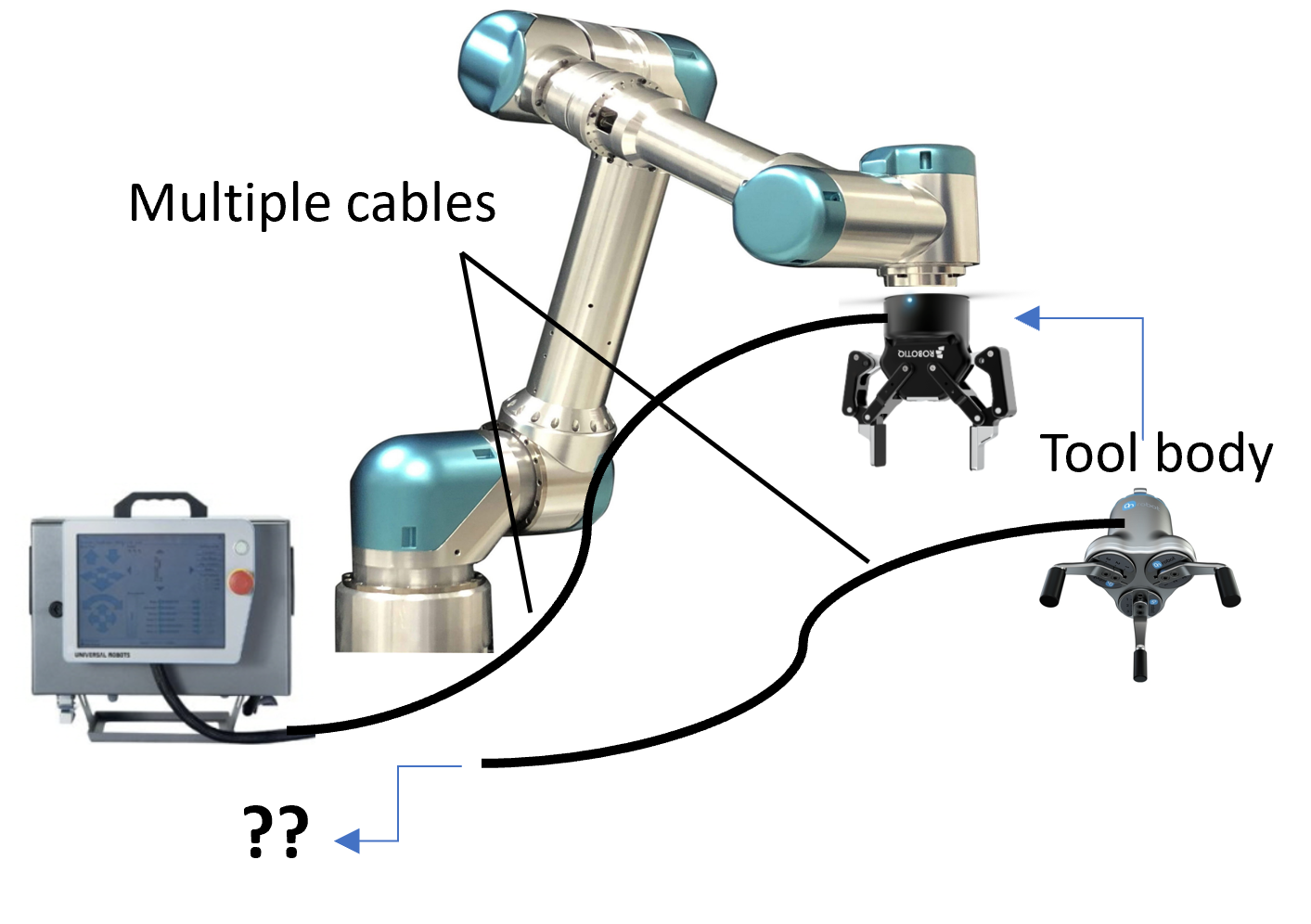
- 문제점: 툴 바디 외에도 툴 케이블(전원/통신)도 함께 교체되어야 하므로 작업 전에 수동 교체만 가능함.
KR-RTS는
작업중 툴 및 핑거의 자동교체가 가능한 신개념 툴링 시스템
기존의 ATC 기반 툴 교체
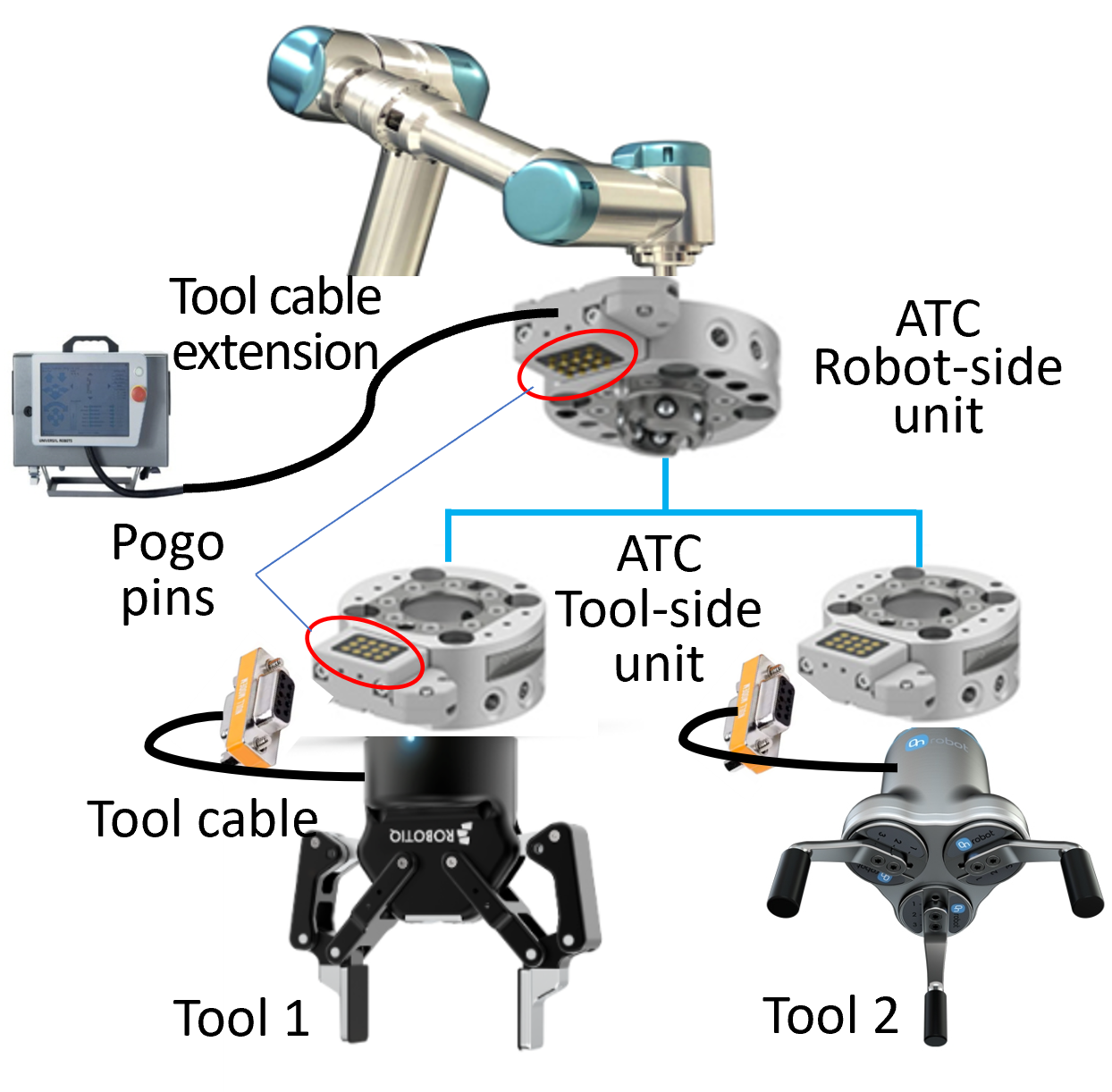
ATC 기반의 툴 교체
- ATC 로봇측 유닛: 로봇 플랜지에 부착되며, 툴 케이블 연장선을 포고 핀(pogo pins)에 연결
- ATC 툴측 유닛: 툴 상단에 부착되며, 툴 케이블을 포고 핀에 연결
- 로봇과 툴의 결합 시에 포고 핀을 통하여 로봇과 툴 간에 전원 및 신호 전달
- ATC는 주로 공압 잠금 방식으로 동작하므로 공압의 공급이 필요하여, 공압 제공이 어려운 AMR 등에서는 사용이 제한됨.
특징
- 기존의 상용 그리퍼를 그대로 사용할 수 있지만, 툴 케이블과 툴 케이블 연장선을 포고 핀에 연결하는 작업에 시간이 많이 소요되고 번거로움.
- 사용하는 툴의 수만큼 툴의 구동부(모터+제어기)가 필요하므로, 다양한 툴을 사용하면 비용이 크게 증가함.
MATC 기반의 자동 툴 교체
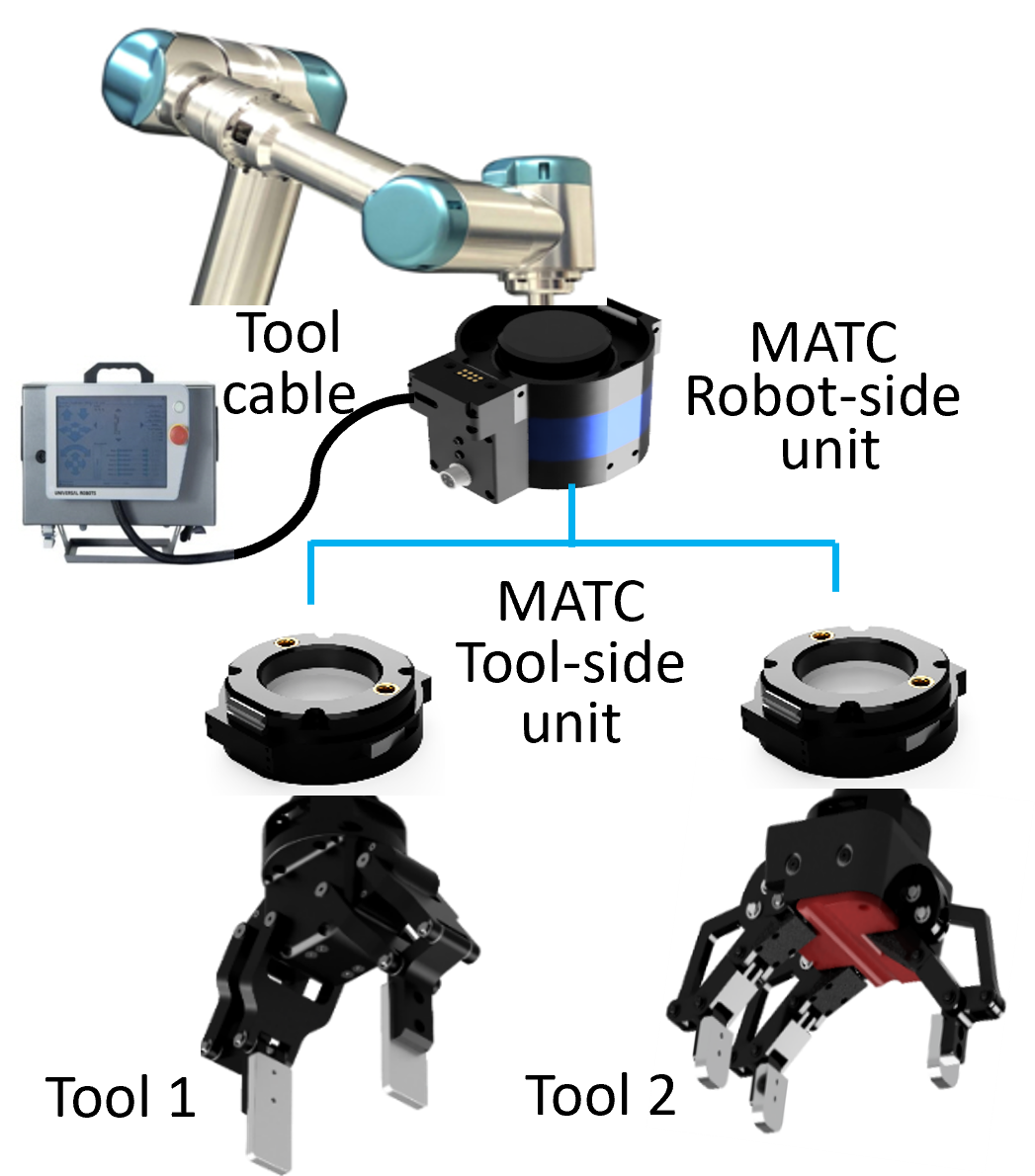
모터 내장형 자동 툴체인저
- MATC 로봇측 유닛: 로봇 플랜지에 부착되며, 내장된 공통 구동부(모터+제어기)를 툴 케이블을 통해서 로봇 제어기나 상위 제어기에 연결됨.
- MATC 툴측 유닛: 순수한 기구부로 구성된 툴의 상단에 부착됨.
- 로봇과 툴의 결합에 상관 없이 구동부는 로봇과 항상 연결되어 있음.
- MATC는 래치 잠금 방식으로 공압의 공급이 필요 없이 로봇의 모션만으로 동작하므로 AMR 등에서도 편리하게 사용 가능함.
공유 구동부
(모터, 제어기 & 케이블)
- 모든 툴이 MATC 로봇측 유닛에 내장된 단일의 구동부를 공유하므로, 단일의 툴 케이블(전원/통신)로 로봇과 항상 연결되어 있음.
- 공통 구동부의 제어에 의해서 각 툴의 특성 및 작업에 맞는 토크와 속도를 갖는 모터 동력이 MATC 로봇측 유닛으로부터 툴측 유닛으로 제공됨.
MATC 호환형 기계식 툴
- 각 툴은 구동부 없이 순수 기계식으로만 구성됨. MATC 호환형 툴은 상단에 MATC 툴측 유닛이 장착되어 있어서 로봇측 유닛과의 결합/분리됨.
- MATC 로봇측 유닛에서 전달하는 모터 동력을 받을 수 있는 입력부가 존재함.
자석 커플링 기반
동력 전달
- MATC 로봇측 유닛과 툴측 유닛 간에는 여러 접촉 문제를 야기할 수 있는 기계식 기어 대신에 자석 커플링을 통해서 회전 동력을 전달함.
- 이와 같이 빈번한 결합 및 분리 시에도 동력 전달부 간의 기계적 접촉이 없으므로 원활한 교체가 가능함.
기존 툴링 방식과의 차별점
| 기존 툴링 시스템 | KR-RTS | |
| 맞춤형 툴 | 판매 중인 툴/그리퍼만 사용 가능 | 맞춤형 툴/그리퍼 신속 제공. |
| ATC의 결합-분리 | 공압 등 외부 동력 필요 | 무동력 래치 잠금 방식 |
| ATC의 역할 | 로봇-툴 간의 결합-분리 기능에 국한 | 결합/분리 + 각 툴에 모터 토크/속도 제공 MATC (Motorized ATC) |
| 툴 구동부 | 각 툴마다 구동부 필요 | 각 툴에는 구동부 필요 없음 |
| 툴 라인업 | 2지, 3지, 진공 그리퍼 등으로 제한된 종류의 툴 제공 | 20종 이상의 그리퍼 제공으로 거의 모든 작업에 대응 가능. |
| 컴플라이언스 제공 | 컴플라이언스 제공이 불가능하여 소프트한 물체의 파지가 어려움 | 컴플라이언스 제공이 가능하여 소프트한 물체 파지에 적합 |
| 핑거 교체 | 작업 전에 수동으로 교체 | 작업 중에 자동 교체 가능 |
| ATC/툴 제조사 | ATC와 툴의 제조사가 다르므로, 일관된 시스템 구성이 어려움 | MATC와 툴의 제조사가 동일하므로, 일관된 시스템 구성이 용이함 |
| AI 기반 툴링 SW | 제공되지 않음 | 작업에 따라 최적의 툴 종류 및 툴 자세 추정 SW 제공 |
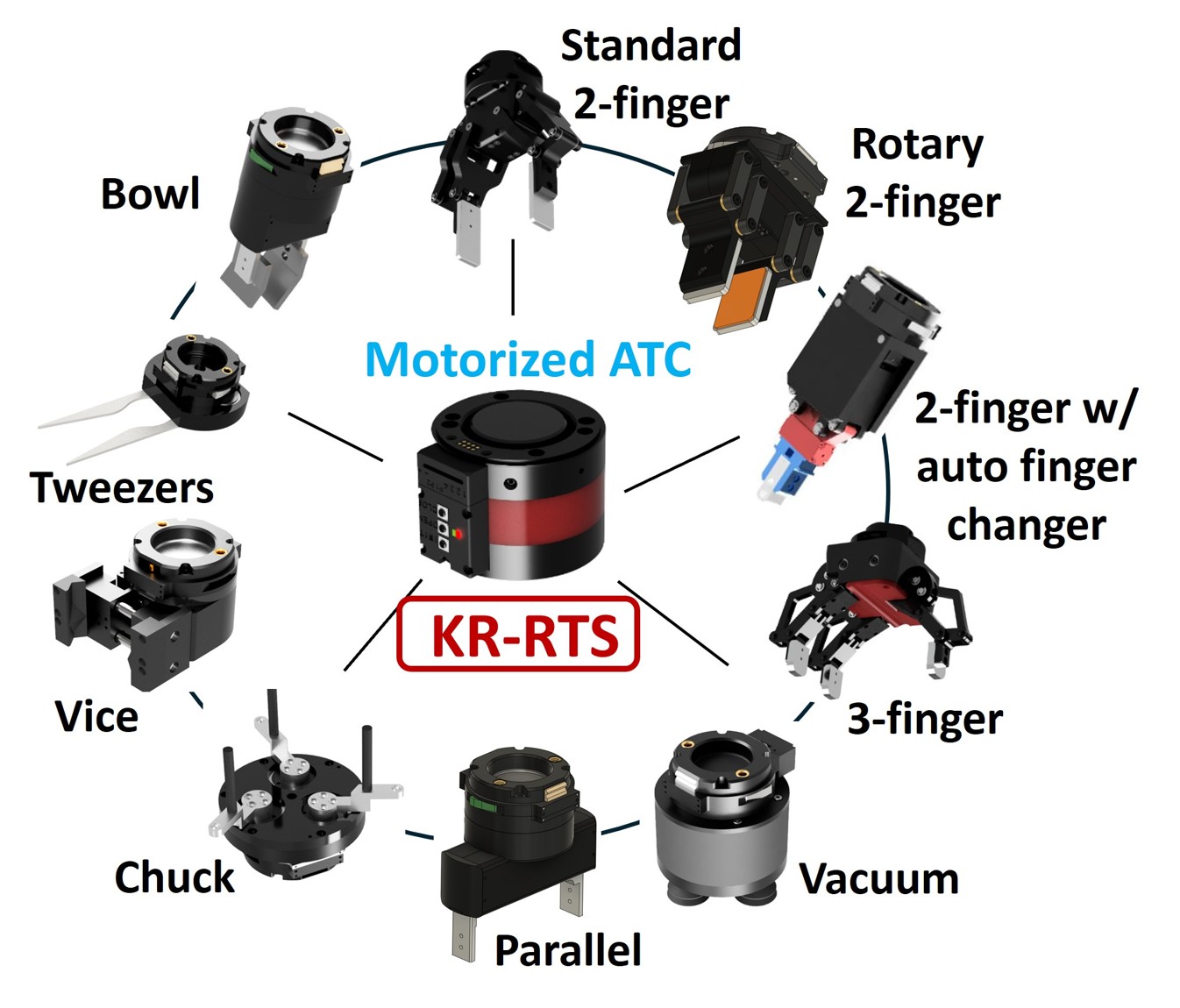
KR-RTS의 툴 라인업
사용 방식
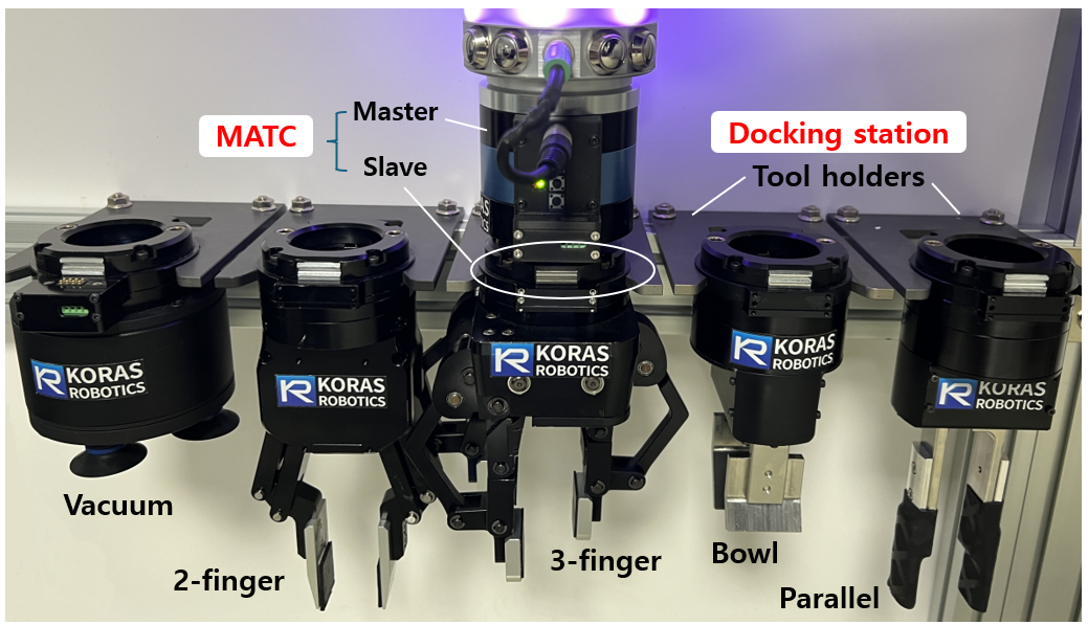
방식 1) MATC + MATC용 툴
MATC의 로봇측 유닛은 로봇 플랜지에 장착되며, MATC의 툴측 유닛은 툴의 상단에 장착된다. 각 툴은 툴 교환 스테이션(tool change station)의 툴 홀더(tool holder)에 거치되어 있으며, 로봇의 동작을 통해서 MATC의 로봇측 유닛과 툴측 유닛이 체결되면 자동적으로 툴이 로봇에 결합되며, MATC 구동부에서 각 툴의 특성과 작업에 맞는 모터 토크/속도를 툴로 전달하여 툴이 동작하게 된다. 여기서 MATC용 툴은 자체 구동부를 내장하지 않으며, 로봇 유닛과의 결합을 위한 툴측 유닛이 툴의 상부에 장착되어 있다.
방식 2) 일체형 툴
툴 자체에 구동부를 내장하여 MATC 없이 사용 가능함. 대부분의 상용 그리퍼가 채택하고 있는 방식임
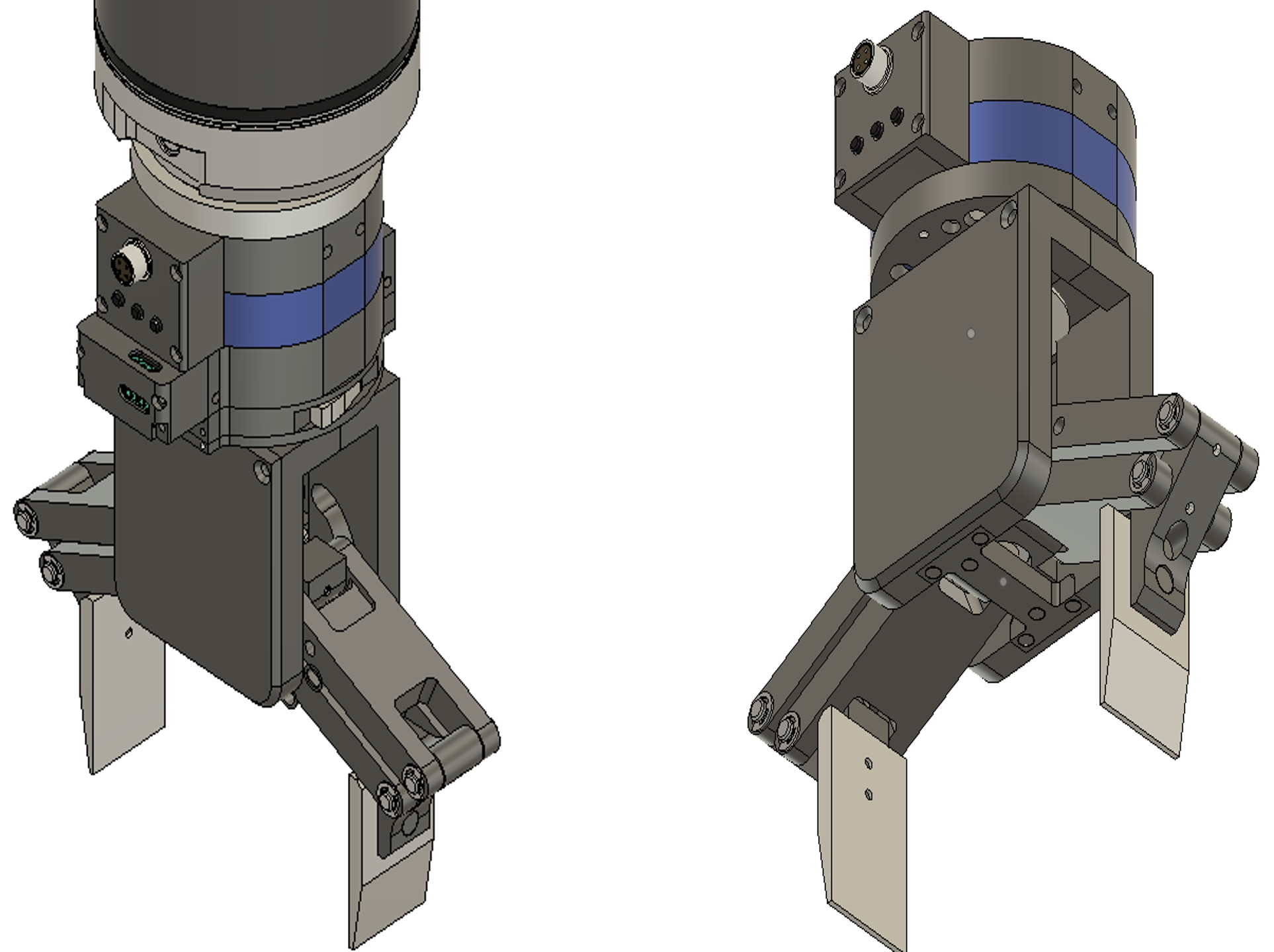
<MATC-compatible 2-finger gripper (left) and integrated 2-finger gripper (right)>
적용 분야

요리로봇 등 요리 자동화

서비스 로봇

대학 및 연구소

협동로봇 제조사

셀 공정 제조현장

물류현장
제품 목록
- 자동 툴체인저 (ATC) or 퀵 체인저,
- 모터 내장형 자동 툴체인저 (MATC)
- 표준형 2지 그리퍼 (가반하중 4kg)
- 핑거 교체형 2지 그리퍼 (가반하중 4kg)
- 회전형 2지 그리퍼 (가반하중 3kg)
- 회전형 2지 그리퍼 (가반하중 10kg)
- 회전형 2지 그리퍼 (가반하중 20 kg)
- 표준형 3지 그리퍼 (가반하중 5 kg)
- 진공 그리퍼 (가반하중 4 kg)
- 평행 그리퍼, (가반하중 3 kg)
- 순응형 평행 그리퍼 (가반하중 3 kg)
- 오프셋 강인형 평행 그리퍼 (가반하중 2 kg)
- 평행 그리퍼 (가반하중 11/15 kg)
- 평행 그리퍼 (가반하중 30 kg)
- 척 그리퍼 (가반하중 3 kg)
- 척 그리퍼 (15 kg)
- 방사형 그리퍼 (가반하중 12 kg)
- 바이스 그리퍼 (가반하중 5 kg)
- 보울 그리퍼 (가반하중 3kg)
- 핀셋 그리퍼
- AI 기반 툴링 SW
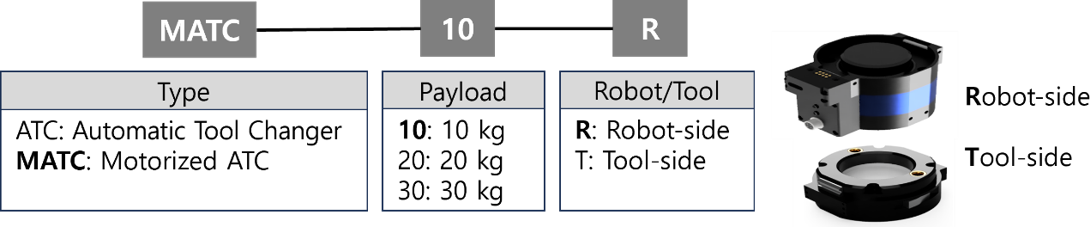
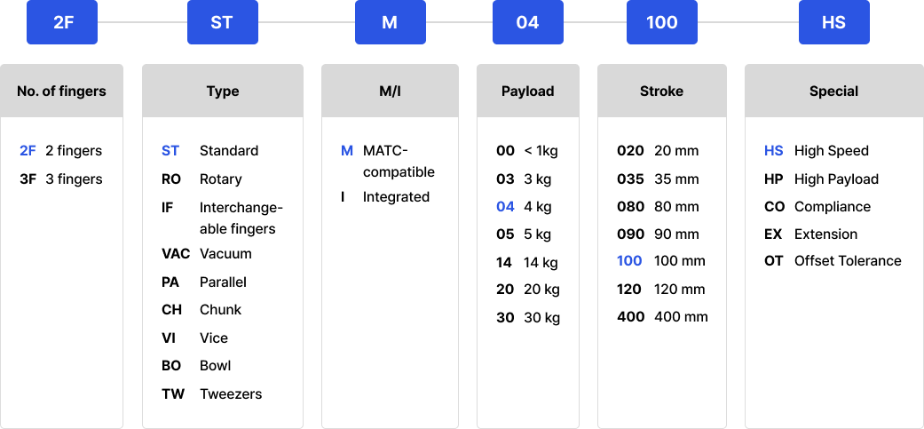
모델명 체계
- 툴체인저
- 그리퍼







{kind=link}
{kind=link}
{kind=link}